April 7, 2026 by Jeff Shepard
Collected at: https://www.eeworldonline.com/how-is-power-limiting-the-adoption-of-physical-artificial-intelligence-in-humanoid-robotics/
Physical artificial intelligence (PAI) is enabling robotics to venture from the relatively safe and predictable operating environments of assembly lines and enter the unpredictable and dynamic world of humanoid robotics. Power presents a primary bottleneck for the proliferation of humanoid robotics.
Energy availability and delivery systems, including power conversion and energy storage, are gating factors in the adoption of PAI in humanoid robotics. For example, existing battery technology limits these robots to typical runtimes under, sometimes far under, 3 hours between charges. The need for most industrial and medical applications is 8 to 20 hours.
The increased energy demand begins with bipedal movement that requires balancing and moving in a three-dimensional (3D) space compared with wheeled robots that move in a simpler and less energy-demanding 2D manner. That also means that more sensors are needed for maintaining balance in addition to providing situational awareness and controlling motion.
The need for more sensors extends to robot hands. Human hands have 27 degrees of freedom of motion. To achieve human-like functionality, a robot hand needs at least 19 degrees of freedom. That requires even more sensors. The greater number of sensors for walking plus grasping objects results in complex sensor fusion algorithms that consume lots of energy.
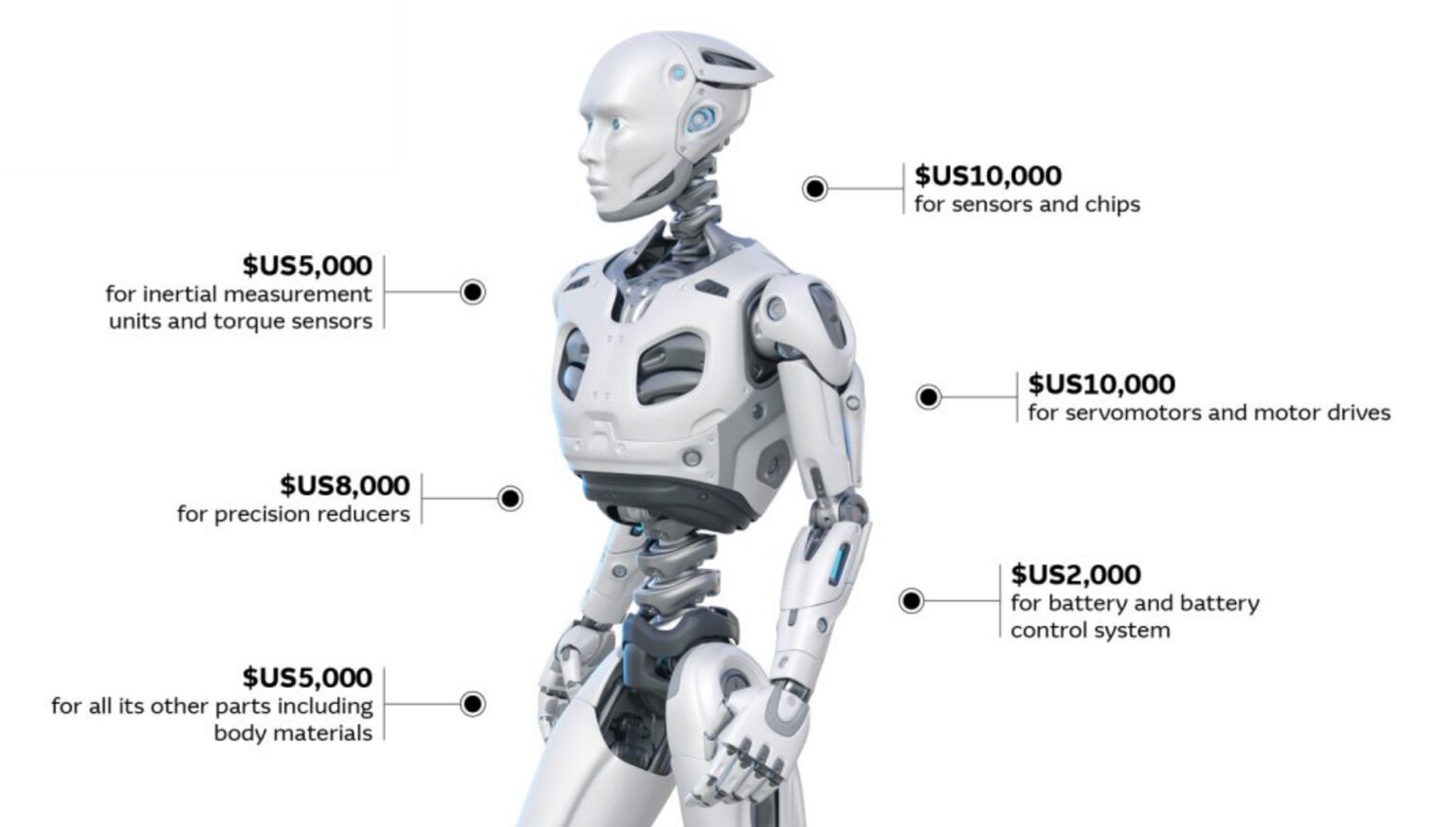
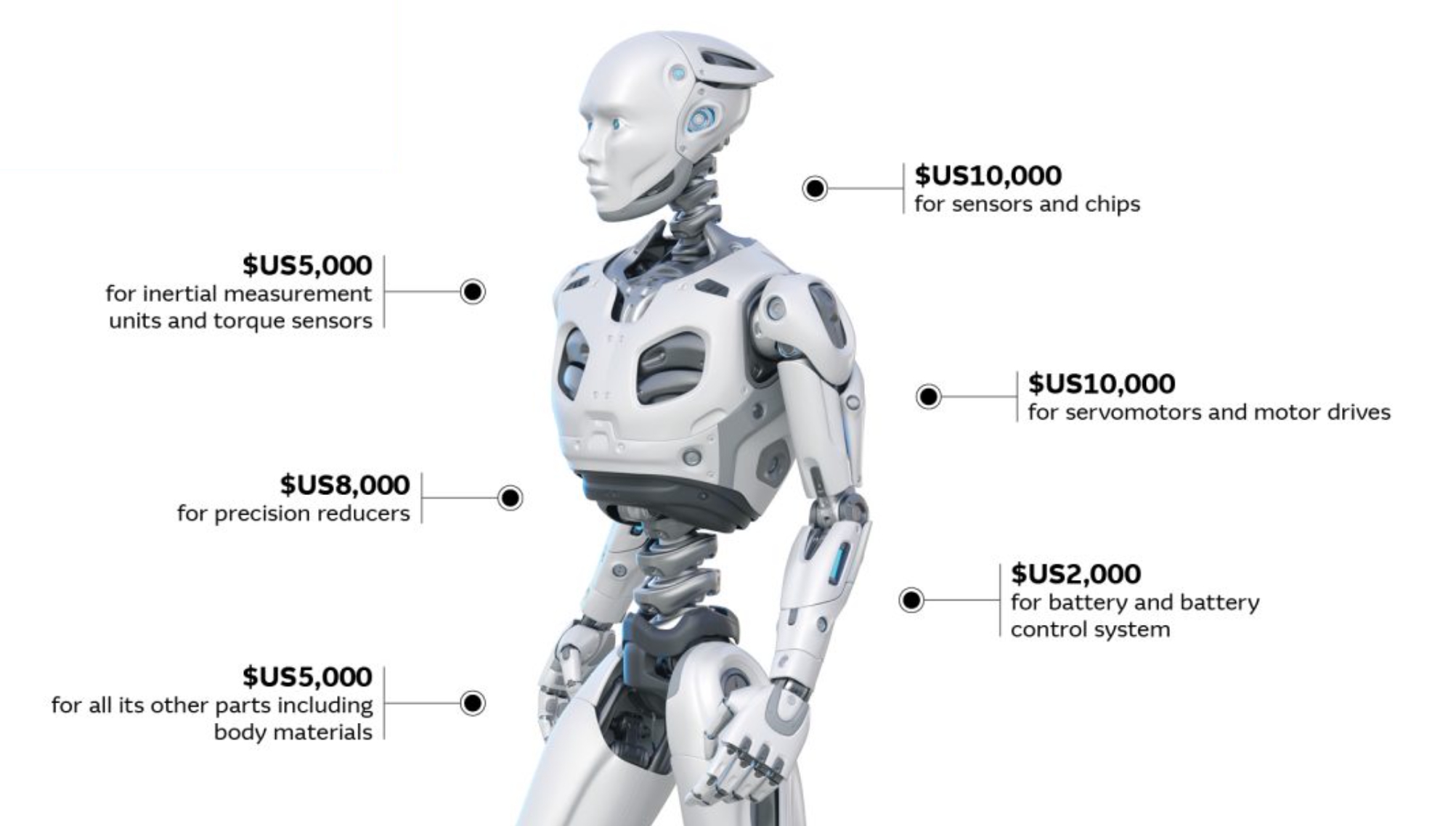
Of course, all those movements require motors and actuators plus associated power drivers, further increasing power consumption and demands on the battery system. Those considerations lead to significant cost issues. A basic humanoid robot battery system, servos, and their drives account for about 30% of the cost of a humanoid robot (Figure 1).
Walking complexities
Walking humanoid robots must take into consideration the zero-moment point (ZMP) and centroidal moment pivot (CMP). Both are ground reference points used to ensure balance.
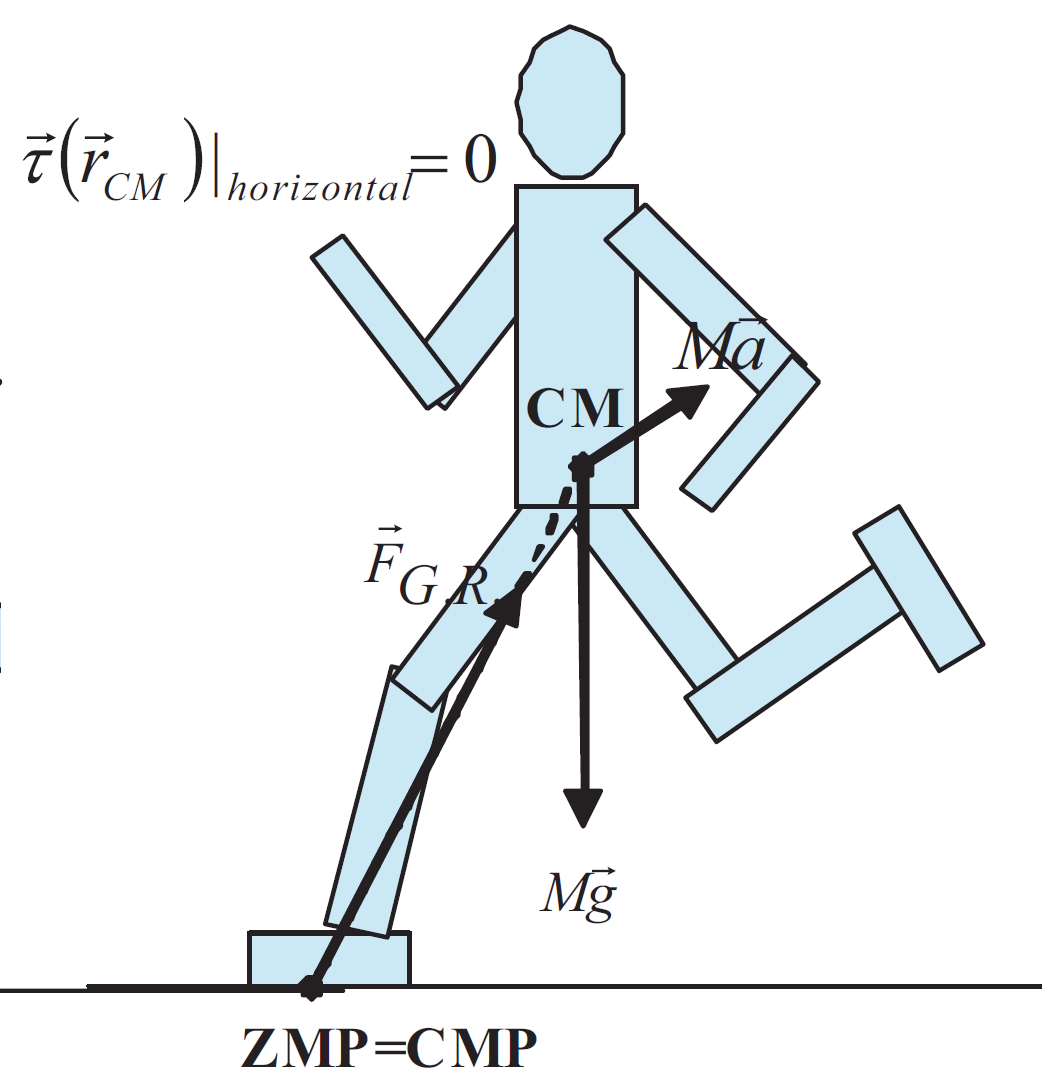
ZMP identifies the point on the ground where the horizontal moment of inertia and gravity forces are zero (used for flat-foot, steady walking). CMP extends this concept to include the effects of changing angular momentum (e.g., arm-swinging or rapid upper-body movement).
When the CMP corresponds with the ZMP, the ground reaction force passes directly through the center of mass (CM) of the body, a necessary condition for ensuring stability.
Those considerations mean that walking requires power-consuming real-time processing of data from multiple sensors and ML/AI-based sensor fusion, in addition to precisely coordinating the movement of numerous actuators in the legs, arms, and torso (Figure 2).
More batteries?
Adding more batteries may be an option for increasing runtimes. However, adding batteries to extend runtime increases robot weight and decreases agility, requiring even more energy for activities like walking. And more batteries directly increase system cost.
Advanced power conversion technologies based on gallium nitride (GaN) are being deployed to mitigate some of the challenges related to power consumption and battery limitations.
Humanoid robots have a fundamental weight constraint not found in electric vehicles (EVs). While EVs can tolerate one-third of their mass being dedicated to battery systems, humanoid robots are typically limited to one-eighth battery mass to ensure balance and agility.
In addition, high-power discharges during rapid, repetitive, and dynamic movements can drastically reduce battery cycle life. In some cases, cycle life can fall to 200 cycles, requiring more frequent battery replacement, and eroding the economics of using humanoid robots.
Robot power food
Power availability isn’t just a technical or economic limitation. It often defines what these robots can do. Some applications, like rescuing people in disaster situations or providing patient care in hospitals, demand extended operation. Short battery runtimes can eliminate humanoid robots from consideration.
There are several options for improving the running time of humanoid robots. Deploying new battery technologies like metal-air chemistries is being explored. These batteries offer high theoretical energy density but are primarily limited by poor rechargeability, low power output, and susceptibility to environmental degradation. They are a work in progress.
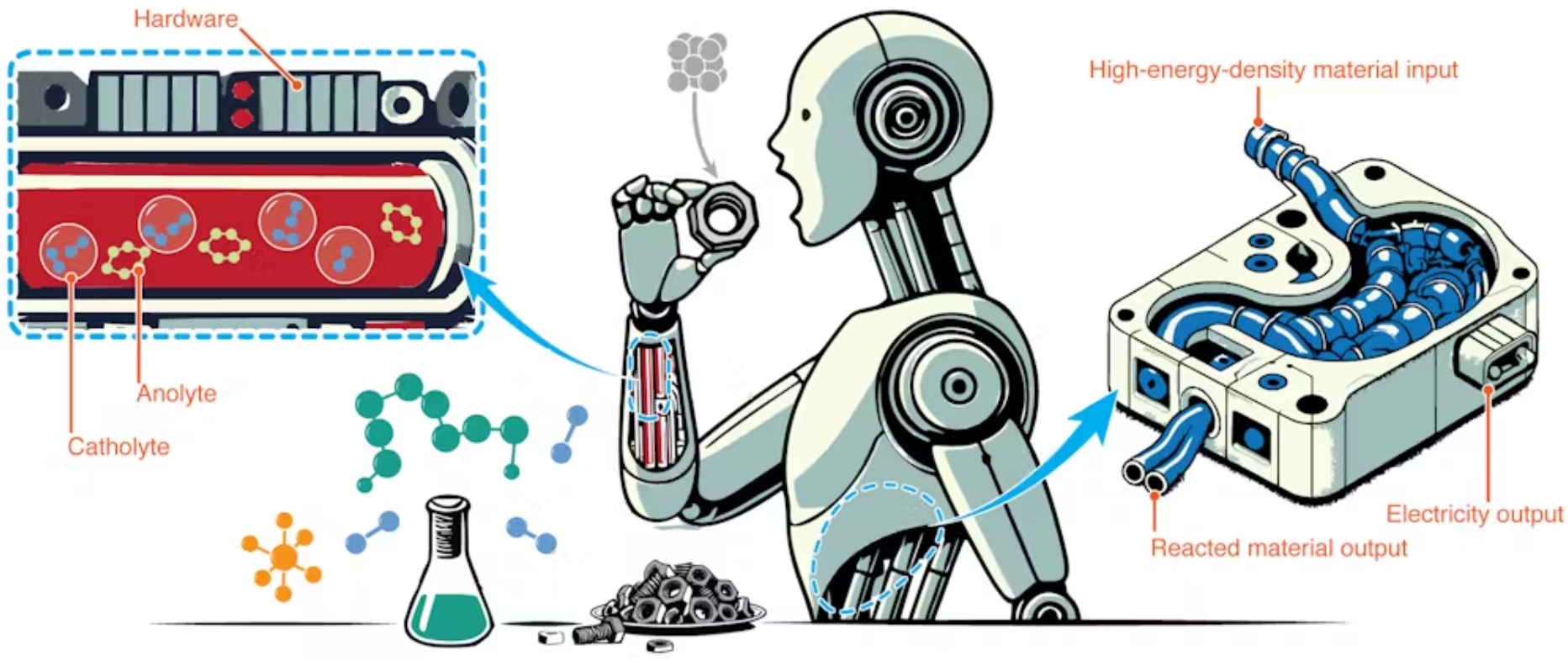
Another approach being investigated is feeding humanoid robots with aluminum or other metals, or chemical fuels to eliminate the limits of batteries (Figure 3). In these systems, oxygen would be combined with the fuel in a reactor using the “food” to produce electricity. Numerous challenges related to waste management, power density, energy density, environmental ruggedness, and other factors still need to be addressed.
Summary
The requirements for energy storage, power conversion, motion control, and numerous actuators to implement PAI in humanoid robots are limiting the development and adoption of those systems. The use of GaN power semiconductors can address some of those issues. But the issue of energy availability requires fundamentally new approaches for energy storage.
References
A Primer for Policymakers on AI-Robotics Convergence, Center for Security and Emerging Technology
AI goes physical: Navigating the convergence of AI and robotics, Deliotte
Are we turning a corner on the humanoid robot age?, Macquaire
Challenges in Humanoid Robotics and How to Overcome Them, Robozaps
Ground Reference Points in Legged Locomotion: Definitions, Biological Trajectories and Control Implications, International Journal of Robotics Research
Humanoid Robots on the Rise: Industry Advances, Key Players, and Adoption Timelines, Topbots
Orchestrating mechanics, perception and control: Enabling embodied intelligence in humanoid robots, Information Processing and Management
Robots run out of energy long before they run out of work to do — feeding them could change that, The Conversation
Top 5 Technical Challenges in Humanoid Robotics, Simplexity
Leave a Reply