By Amit Malewar Published: April 9, 2026
Collected at: https://www.techexplorist.com/motor-free-soft-rigid-hybrid-robots/102619
Origami gives engineers a toolkit of foldable 3D shapes that can change form and function. These structures can shift between folded states and adjust their strength and behavior; this is useful for compact, flexible machines like soft robots.
Soft robots aim to move and change shape smoothly, but they often rely on bulky motors or external systems. To overcome this, Princeton engineers created soft-rigid hybrid robots that don’t need motors or air pumps. They used a special printable material called a liquid crystal elastomer, combined with flexible electronics and origami-inspired folding.
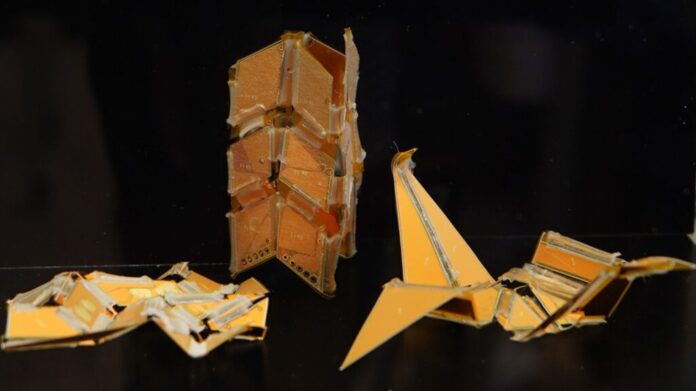
With 3D printing, the team built a robot that can move repeatedly without wearing out. As a demonstration, they made a soft robot shaped like an origami crane. After applying an electric field, the crane starts flapping its wings, not with a motor, but through controlled heating of the polymer. The robot can move precisely, return to its original shape, and follow real-time programmable sequences, showing promise for future applications in soft robotics.
Using a 3D printer, the team printed molten polymer into patterned zones. Thanks to the liquid crystal elastomer, the polymer’s internal molecules have an ordered structure.
The researchers programmed the 3D printer so that, as it printed, the polymer’s molecules lined up in specific directions within different zones. Each zone had a consistent molecular orientation. By stacking and connecting these zones in carefully chosen patterns, they created built-in hinges. When the material was heated, these hinges bent in predictable, pre-programmed ways, allowing the robot to move exactly as designed.
The team also embedded flexible electronics into the material’s hinges. Thanks to the flexibility of circuit boards, researchers were able to embed them directly into the printing material. The researchers designed the system to heat specific regions of the polymer. With tiny temperature sensors built right into the material, they achieved closed-loop control, meaning the robot could respond in real time to the heating.
Because the polymer was carefully structured during printing, heating caused it to contract in programmed ways, triggering folds along the hinges.
To ensure folding occurred only at those hinges, the team reinforced the areas between them with thin fiberglass panels attached to the flexible circuit boards. This clever setup enabled the robot to achieve precise, repeatable motion without motors.
Emily Davidson said, “A critical advance in the current work was the integration of 3D printed liquid crystal elastomers with printed circuit boards that could be commercially manufactured. The ability to co-design the liquid crystal elastomer hinges and the flexible printed circuit boards to drive actuation made the fabrication and control of these soft-rigid soft robots feasible.”
To control the robot’s motion, such as folding and unfolding, researchers used mathematical models derived from origami patterns.
David Bershadsky from the graduate school at the University of Texas stated, “The work is primarily an ‘integration of material science with robotics with a focus on manufacturability.”
“I think the big contribution is that we showed integration of a complex system where we have local heating control. We can control activation depending on where we heat.”
In addition to proving that their soft-rigid robot design works, Bershadsky also built a software tool to help other designers create their own robots. This tool is freely available on the lab’s GitHub page. It includes the dataset from the published paper, making it easier for researchers and engineers to experiment and build on the work.
Journal Reference:
- David C. Bershadsky, Tuo Zhao, Glaucio H. Paulino, Emily C. Davidson. Digital Actuation Control of Soft Robotic Origami With Self-Folding Liquid Crystal Elastomer Hinges. Advanced Functional Materials. DOI: 10.1002/adfm.202525150
Leave a Reply