March 12, 2026 by Ingrid Fadelli, Phys.org
Collected at: https://techxplore.com/news/2026-03-bicycle-robot-fast-obstacles.html
Experienced human cyclists can perform a wide range of maneuvers and acrobatics while riding their bicycle, from balancing in place to riding on a single wheel or hopping over obstacles. Reproducing these agile maneuvers in two-wheeled robots could open new opportunities both for entertainment or robot sports and for the completion of complex missions in rough terrain.
Researchers at the Robotics and AI Institute (RAI) and their collaborators recently created a new robotic platform called Ultra Mobility Vehicle (UMV) that moves at high speed and with remarkable agility, jumping over high obstacles and maintaining balance even on a single wheel.
The new two-wheeled robot, introduced in a paper published on the arXiv pre-print server, can successfully execute dynamic maneuvers like those performed by skilled human cyclists.
“A fundamental challenge in robotics is balancing robots that move with speed while being terrain agnostic,” Ben Bokser and Surya Singh, two of the co-authors of the paper, told Tech Xplore.
“Wheels provide efficiency while legs handle stairs, curbs, and rough terrain. It becomes a trade-off of how complex, expensive, and energy-hungry you want your robot to be versus how much you want the robot to be able to handle the unknown while it moves around. We kept coming back to the fact that trial cyclists and mountain bikers bridge this gap every day.”
An ultra mobility vehicle inspired by cyclists
The team was inspired by the acrobatics performed by human cyclists on two wheels, such as their ability to ride fast on different terrains, hop over obstacles and temporarily balance on a single wheel. They thus set out to develop a robot with two wheels and a frame that could replicate similar movements.
“We asked: what if we took that same form factor and gave it the ability to dynamically reposition its mass—the way a rider shifts their body—using a compact articulated mechanism and modern learning-based control?” said Bokser.
“Our primary objective was to show that you don’t need a dozen degrees of freedom to achieve athletic robotic motion. We wanted to demonstrate that a bicycle-based robot with only five actuated degrees of freedom could drive at high speed, balance dynamically, and jump onto obstacles that are taller than the robot itself.”
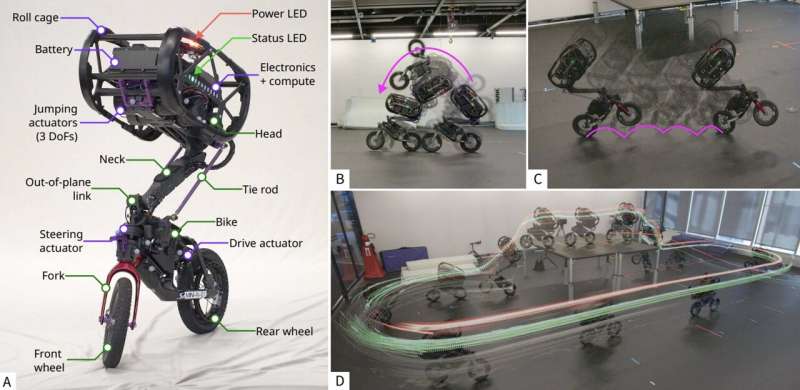
UMV, the system developed by the researchers, is essentially a robotic bicycle with two in-line wheels, a steering frame and a rear-wheel drive configuration. This configuration entails that a motor propels the robot by sending power exclusively to the rear wheel, while the front wheel is only responsible for steering.
“UMV is a testbed for exploring what’s possible when you pair mechanical simplicity with sophisticated control and helps bring into focus the idea of a robot that can efficiently go almost anywhere,” explained Singh.
“What makes it different is a powered spatial linkage that connects a heavy ‘head’ unit to the bicycle frame through a ‘neck’ and tie rods. Think of the head as the rider: it contains most of the robot’s mass, including the batteries, compute, and actuators. When those actuators fire, they let the robot ‘throw’ its mass around, crouching then jumping or shifting laterally to balance.”
Extreme mobility in real-world environments
The team’s unique design ultimately provides the UMV robot with an agility comparable to that of legged robots, while retaining the simplicity of a wheeled robot. Specifically, the team’s robot only has five actuated degrees of freedom (DoF), compared to the twelve or more that are typical of four-legged and two-legged robots.
“Fewer joints generally mean less weight, lower manufacturing complexity and fewer things that can break,” said Bokser.
“Whether it’s driving, balancing, wheelies, hopping, jumping, or flipping, all the UMV’s behaviors are controlled by reinforcement learning policies trained entirely in simulation and transferred to the real robot without additional tuning. This is important because many of these behaviors, like the ‘shimmy-turn’ where the robot pivots in place by quickly stepping its front wheel sideways, weren’t explicitly programmed. They emerged as solutions the learning algorithm discovered on its own.”
The reinforcement learning-based approach that the team used to plan the robot’s movements could be easily scaled and used to derive new strategies to circumvent obstacles or reach desired locations. This means that the robot could autonomously identify the best agile movement sequences that will allow it to successfully complete a mission.
The paper reports three notable contributions. The first is the robot’s morphology itself. It shows that a bicycle-based form factor, which most people associate with simple transportation, can achieve athletic performance comparable to state-of-the-art legged robots.
“Jumping 1 meter—130% of the robot’s own height—and reaching speeds of 8 meters per second puts UMV in the same performance range as much more mechanically complex platforms,” said Bokser.
The team also introduced a unified reinforcement learning framework that can produce different movements ranging from stable driving to acrobatic front flips, all while only slightly adapting rewards during training. Notably, the robot was found to successfully execute different agile maneuvers both in simulations and in real-world experiments,
“The fact that the reinforcement learning policies transfer from simulation to reality without additional tuning is significant because it means the approach could generalize to new behaviors as we continue to develop the platform,” said Bokser.
Singh emphasized from a design perspective that, “What is absent from our design matters as much as what’s present. UMV has no reaction wheels, no kickstands, etc. Stability is entirely a product of dynamic control. This follows a principle that has guided a lot of work at RAI: we use computation to unlock mechanical capability.”
Future applications and planned improvements
The UMV platform could soon be improved further and tested in a wider range of real-world scenarios.
“In terms of practical applications, UMV’s combination of speed, small spatial footprint, and obstacle-clearing ability suggests roles in urban delivery, long-distance transport over rough terrain, or inspection in environments where a wider vehicle can’t navigate,” said Bokser.
“Yet more broadly, UMV is a research platform—it’s helping us understand the intersection of mechanical design, learning-based control, and dynamic locomotion at a fundamental level. These lessons apply across robotics.”
The colleagues at RAI are currently planning new research aimed at further enhancing the performance of their robot and broadening its skills. Eventually, they hope to fully bridge the gap between simulation and real-world experiments, ensuring that UMV is best equipped to navigate unpredictable and dynamic environments.
“We’re using massively parallel simulation techniques to create richer, more diverse training,” added Singh. “The ultimate goal is high-speed autonomous traversal of varied, unstructured environments, where the robot perceives the terrain ahead and selects the right behavior—driving, jumping, hopping—in real time. Beyond that, we’ll have more to share soon. New hardware, new environments for testing, and more are just on the horizon.
Publication details
Benjamin Bokser et al, System Design of the Ultra Mobility Vehicle: A Driving, Balancing, and Jumping Bicycle Robot, arXiv (2026). DOI: 10.48550/arxiv.2602.22118
Journal information: arXiv
Leave a Reply