March 8, 2026 by University of Oxford
Collected at: https://techxplore.com/news/2026-03-ultra-technique-slash-price-soft.html
Engineers at Oxford University have developed a rapid, ultra-low-cost method for manufacturing soft robots using common lab equipment. The method has been published in Advanced Science. The new technique enables researchers to fabricate soft robotic actuators—the flexible components that power movement—in under 10 minutes at a material cost of less than $0.10 (US Dollars) per unit.
Principal Investigator and corresponding author, Professor Antonio Forte (Department of Engineering Science, University of Oxford) said, “By lowering the financial and technical barriers to fabrication, this advance could significantly democratize and accelerate soft robotics research and prototyping across laboratories, start-ups, and educational settings.”
Soft robots, made from compliant materials that bend and deform, are increasingly used in applications ranging from delicate object handling to search-and-rescue technologies. However, traditional manufacturing methods often rely on silicone molding, specialist 3D printing systems, or complex textile lamination processes—all of which can be time-consuming, costly, and equipment-intensive.
A simple, low-cost fabrication recipe
The Oxford team’s new approach combines commercially available vacuum-sealable plastic pouches with precision laser cutting. By removing air between layers before laser processing, the researchers can both seal and shape inflatable structures with high accuracy, creating programmable bending actuators in a single cut-and-seal step.
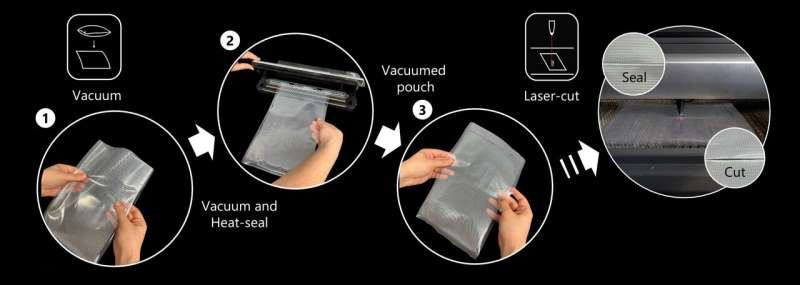
Manufacturing process of inflatable soft actuators. Vacuuming thermoplastic pouches using a commercial vacuum and heat-sealing machine. Laser cutting thermoplastic pouches to produce cuts and seals. Credit: Rezanejad et al, 2026.
The process requires just three components: commercial thermoplastic vacuum pouches (costing less than 10 cents per actuator), a standard vacuum sealing machine, a laser cutter or a desktop laser engraver.
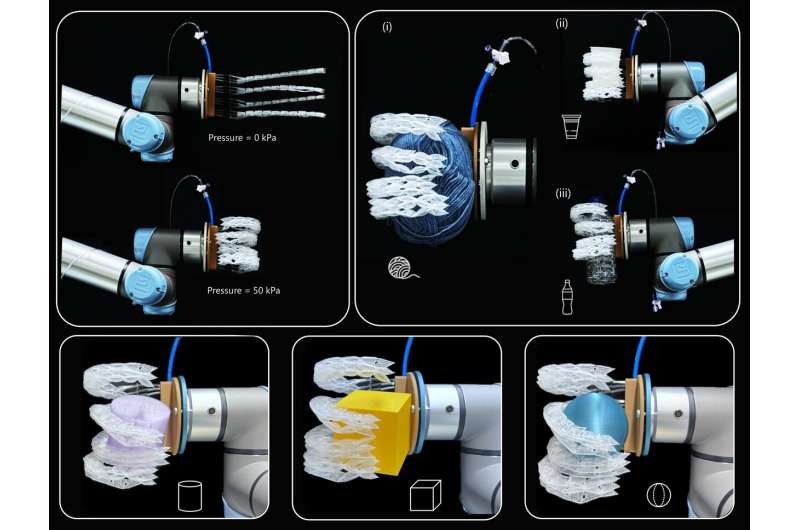
Once fabricated, the inflatable actuators bend predictably when pressurized, enabling complex and programmable movements. Using this approach, the team built a soft robotic gripper capable of lifting 25 times its own weight, and ultra-light crawling and swimming robots.
Lead author, Postdoctoral Researcher Ashkan Rezanejad (Department of Engineering Science, University of Oxford) said, “Using this approach, we even produced inflatable animal structures, including turtles and cranes. By enabling creative and artistic projects, our method could be particularly valuable for education and attracting students to soft robotics.”
Performance, durability and design tools
Beyond cost savings, the team systematically tested the mechanical performance and durability of the actuators. The thermoplastic structures demonstrated strong output forces at relatively low pressures and were able to withstand up to 100,000 inflation–deflation cycles during durability tests.
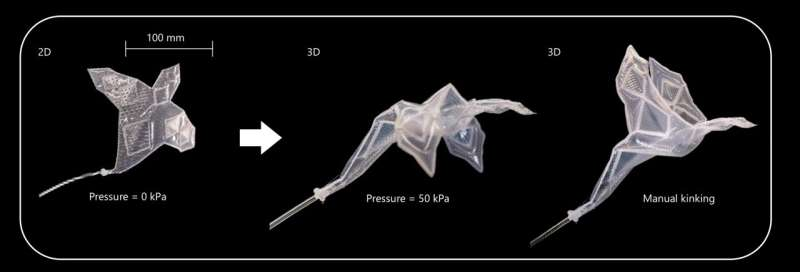
An artistic example of a soft inflatable animal fabricated using our method. An inflatable bird (internal pressure of 50 kPa) with kinking wings, demonstrating reconfiguration of its flight posture while inflated. Credit: Rezanejad et al, 2026.
The researchers also developed a computational design framework that allows engineers to “program” how the actuators bend by adjusting geometric parameters. This enables the creation of predictable shapes, including spirals and letter-shaped structures.
Soft robotic systems are being explored for applications including minimally invasive medical devices, wearable technologies, adaptive manufacturing tools, and exploration in hazardous environments. Reducing fabrication complexity may help researchers iterate more quickly and scale new designs more efficiently.
In future work, the researchers intend to explore other compatible thermoplastic materials and how the method could be adapted to enable more complex motions, such as twisting and multi-directional movements.
Publication details
Vacuum–laser fabrication of programmable soft actuators, Advanced Science (2026). advanced.onlinelibrary.wiley.c … i/10.1002/advs.74289
Journal information: Advanced Science
Leave a Reply