November 28, 2025 by Yale University
Collected at: https://techxplore.com/news/2025-11-robots-combine-ai-theory-advanced.html#
When it comes to training robots to perform agile, single-task motor skills, such as handstands or backflips, artificial intelligence methods can be very useful. But if you want to train your robot to perform multiple tasks—say, performing a backward flip into a handstand—things get a little more complicated.
“We often want to train our robots to learn new skills by compounding existing skills with one another,” said Ian Abraham, assistant professor of mechanical engineering. “Unfortunately, AI models trained to allow robots to perform complex skills across many tasks tend to have worse performance than training on an individual task.”
To solve for that, Abraham’s lab is using techniques from optimal control—that is, taking a mathematical approach to help robots perform movements in the most efficient and optimal way possible. In particular, they’re employing hybrid control theory, which involves deciding when an autonomous system should switch between control modes to solve a task. The research is published on the arXiv preprint server.
One use of hybrid control theory, Abraham said, is to combine the different methods in which robots learn new skills. These include, for instance, methods of learning from experience with reinforcement learning, or through model-based learning in which robots plan their actions through observing. The trick is getting the robot to switch between these modes in the most effective way so that it can perform high-precision movements without losing performance quality.
“Think of how we learn new skills or play a sport,” he said. “We first try to understand and predict how our body moves, then eventually movement becomes muscle memory and so we need to think less.”
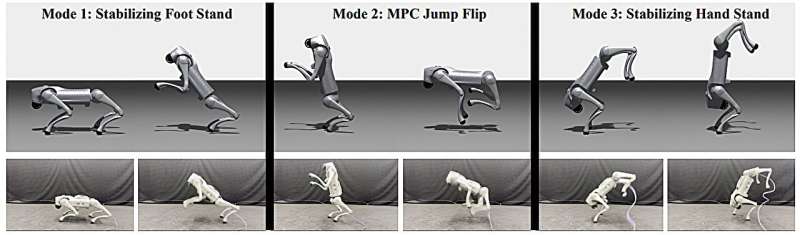
Abraham and his research team applied methods from hybrid control theory to a dog-like robot, training it to successfully balance and then flip over.
As part of the robot training, AI methods are used to develop the more challenging motor skills that require whole-body precision. Hybrid control theory is then leveraged to schedule and synthesize the various mechanisms for robots to learn diverse motor skills to gain more complex, compounding behaviors.
Ideally, this could lead to robots working in homes and other unstructured environments.
“If a robot needs to learn a new skill when deployed, it can draw from its arsenal of learning modality, using some level of planning and reasoning to ensure safety and its success in the environment, with on-the-job experience,” Abraham said. “Once a certain level of confidence is achieved, the robot can then use the more specialized learned skills to go above and beyond.”
More information: Yilang Liu et al, Sample-Based Hybrid Mode Control: Asymptotically Optimal Switching of Algorithmic and Non-Differentiable Control Modes, arXiv (2025). DOI: 10.48550/arxiv.2510.19074
Journal information: arXiv
Leave a Reply